
Continuum Robotics Emerges as a Research Field
In the 1990s, continuum robotic research has continued from the previous decade and also been taken up by more research groups. On the one hand, we have seen further developments in elephants trunk inspired continuum robots. On the other hand, researchers investigated novel designs to reduce the size of continuum robots. The focus laid on either purely fluid-driven continuum robots or hybrid continuum robots which also use tendon/wire actuation. In addition to the advancements in continuum robot design, progress on modeling techniques for continuum robotics was made, which marks an important milestone for advanced developments.
Continuum Robot becomes a Term
- Hyper-redundant manipulators
- a robot with many more degrees of freedom than the minimum required for a task.
Before the 1990s, continuum robots have been called “highly-articulated”, “tentacle”, or “flexible” robots. In the early 1990s, Chirikjian and Burdick coined the term of hyper-redundant manipulators1. They differentiate
A discrete morphology manipulator […] with a large, but finite number of rigid links. A continuous morphology manipulator […] whose actuation is distrubuted over the robot’s length and whose shape is continously deformable.2
As such, continuum robots belong to the broader category of hyper-redundant manipulators. The term continuum robot was established by Robinson and Davies in 1999 in the first state of the art paper3 published at ICRA. They define continuum robots in contrast to discrete mechanisms:
- Continuum robots
-
do not contain rigid links and identifiable rotational joints. Instead the structures bend continuously along their length via elastic deformation and produce motion through the generation of smooth curves, similar to the tentacles or tongues of the animal kingdom.3
Beside defining the category of continuum robots, Robinson and Davies also classify the types of actuation in intrinsic, extrinsic, and hybrid for differentiation of continuum robot types.
Hybrid Continuum Robot Systems
A hybrid continuum robot system of fluidic-driven pneumatic bellows and tendon wires, inspired by elephant trunks and tentacles was introduced in the mid 1990s by Immega and Antonelli4. The prototype can extend, contract, and bend in 6 DOF by using tendons threaded through cable guides. This continuum robot was developed by Kinetic Sciences Inc. with a patent4 filed in 1992 and granted in 1994. Yet, the robot was never commercially available.
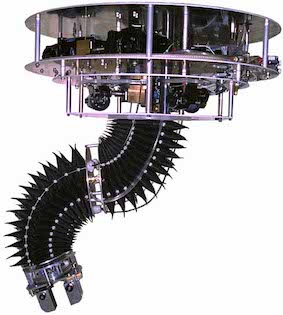 |
| KSI elephant trunk like robot based on pneumatic bellows and tendon actuation. |
Fiber-reinforced Soft Continuum Robots
Soft continuum robotics research advanced towards small diameter designs, by the introduction of fiber-reinforced robot designs by Suzumori et al. in 19915. A silicon rubber bladder is restricted in radial expansion by fiber-reinforcement such that pressurization causes elongation rather than shortening. The design requires low pressure for operation and is scalable. The smallest diameter prototype was realized with 1 mm. Intended use of the design is for multiple applications, such as a four-fingered robot hand, a series of fiber-reinforced segments as a manipulator, or a six-legged walking robot.
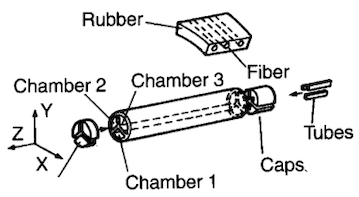  |
| Fiber-reinforced soft continuum robots principle and prototype walking robot with 1 mm diameter legs.5 |
Backbone Curves
Progress and innovation in continuum robot modeling, particularly in kinematics took place in the 1990s. An important milestone is the work of Greg Chirikjian who introduced the backbone curve approach to model the kinematics2 and the dynamics6 of hyper-redundant robots. His approach allows to determine the continuous morphology of a robot with a large or infinite degree of kinematic redundancy, typically the centerline or spine. Chirikjian assumes the backbone curve to be a piecewise continuous curve and describes the morphology in respect to a reference backbone curve. The use of backbone curve alongside model reduction (Chirikjian used a modal approach2) marks a fundamental modeling approach used in continuum robotics until today.
References
-
G. S. Chirikian and J. W. Burdick: Hyper-redundant Robot Mechnisms and Their Applications. IEEE/RSJ International Workshop on Intelligent Robots and Systems, pp. 185-190, 1991. ↩
-
G. S. Chirikjian and J. W. Burdick: A Modal Approach to Hyper-Redundant Manipulator Kinematics. IEEE Transaction on Robotics, 10(3):343–353, 1994. DOI: 10.1109/70.294209 ↩ ↩2 ↩3
-
G. Robinson and J.B.C. Davies: Continuum robots - a state of the art. IEEE International Conference on Robotics and Automation, pp. 2849-2854, 1999. doi: 10.1109/ROBOT.1999.774029. ↩ ↩2
-
G. Immega, “Tentacle-like manipulators with adjustable tension lines,” US5317952A, Kinetic Sciences Inc., 1994 ↩ ↩2
-
K. Suzumori, S. Iikura, and H. Tanaka: Development of Flexible Microactuator and Its Applications to Robotic Mechanisms. IEEE International Conference on Robotics and Automation, pp. 1622-1627, 1991. DOI: 10.1109/ROBOT.1991.131850 ↩ ↩2
-
G. S. Chirikjian: Hyper-redundant manipulator dynamics: a continuum approximation. Advanced Robotics, 9(3):217–243, 1994. DOI: 10.1163/156855395X00175 ↩