Introducing OpenCR-MuJoCo
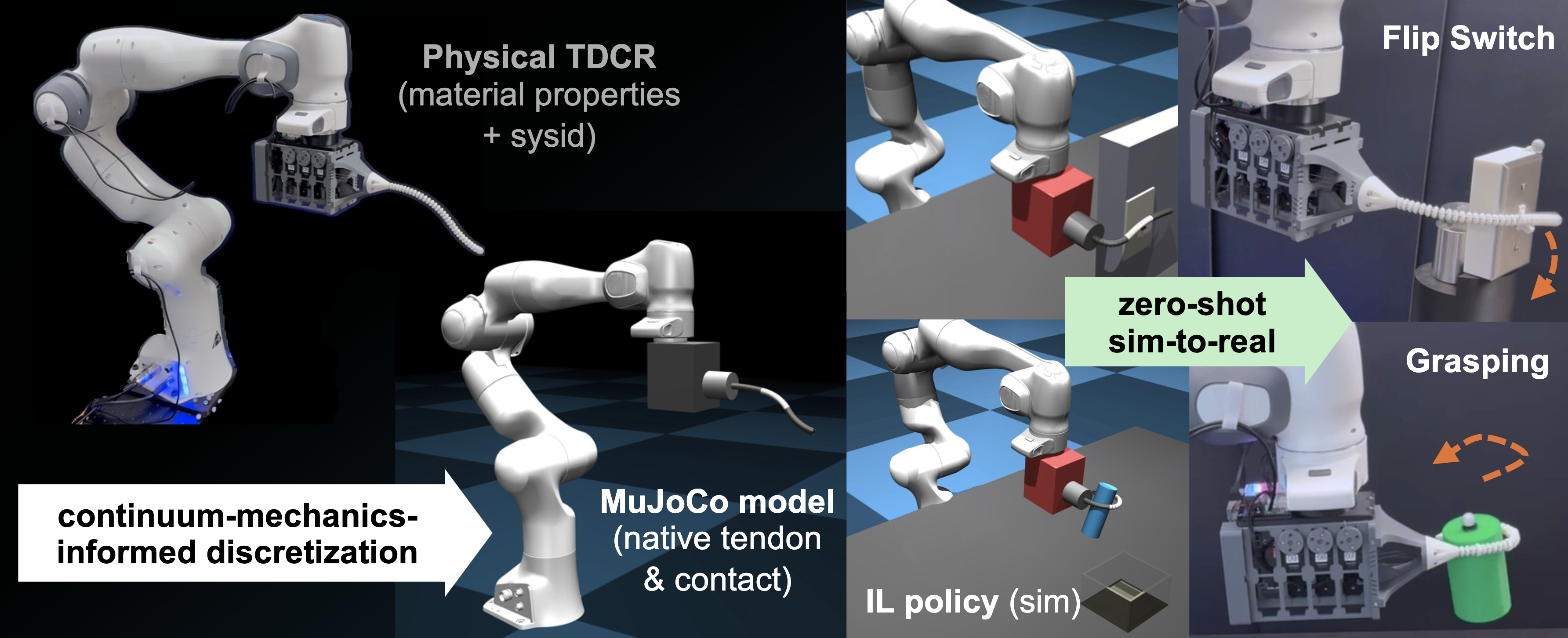
An open-source MuJoCo workflow for tendon-driven continuum robots, contact-rich manipulation, and reproducible benchmarking.
Welcome to the Open Continuum Robotics Blog!
The blog features entry level educational content, advanced research results, historical perspectives, hands-on projects, resources, as well as opinions on continuum robotics.
An open-source MuJoCo workflow for tendon-driven continuum robots, contact-rich manipulation, and reproducible benchmarking.
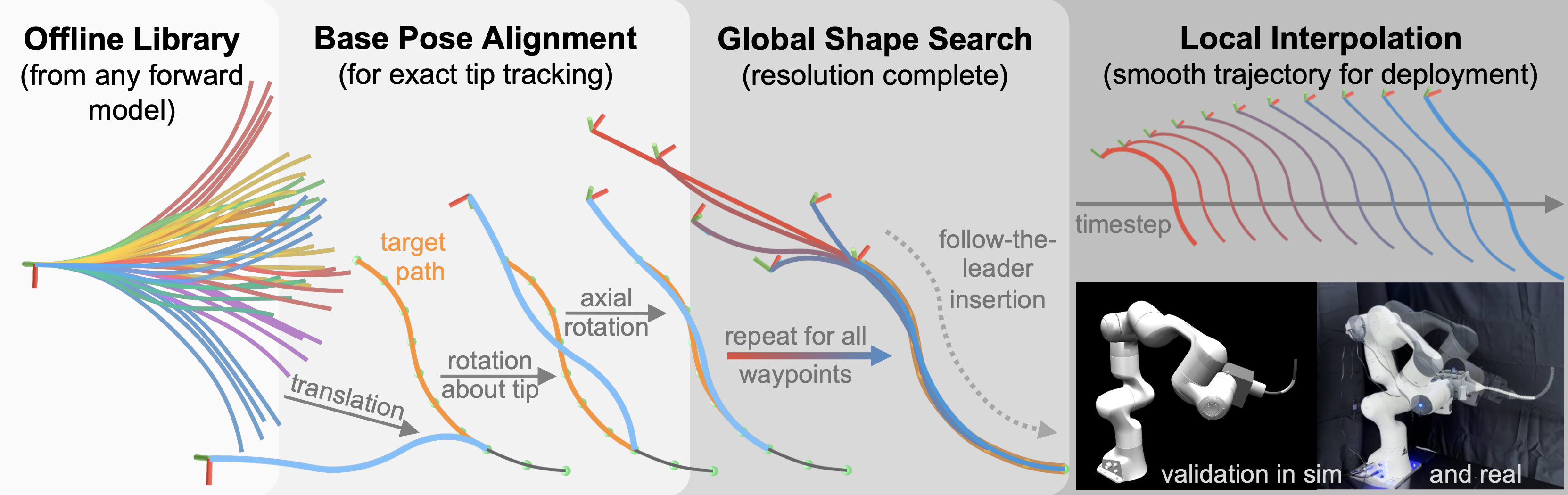
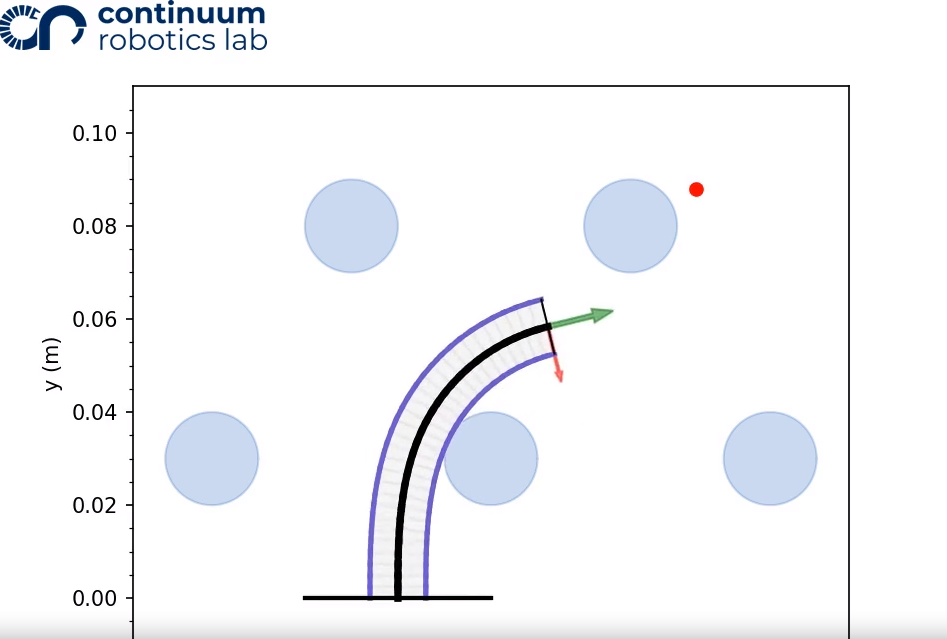
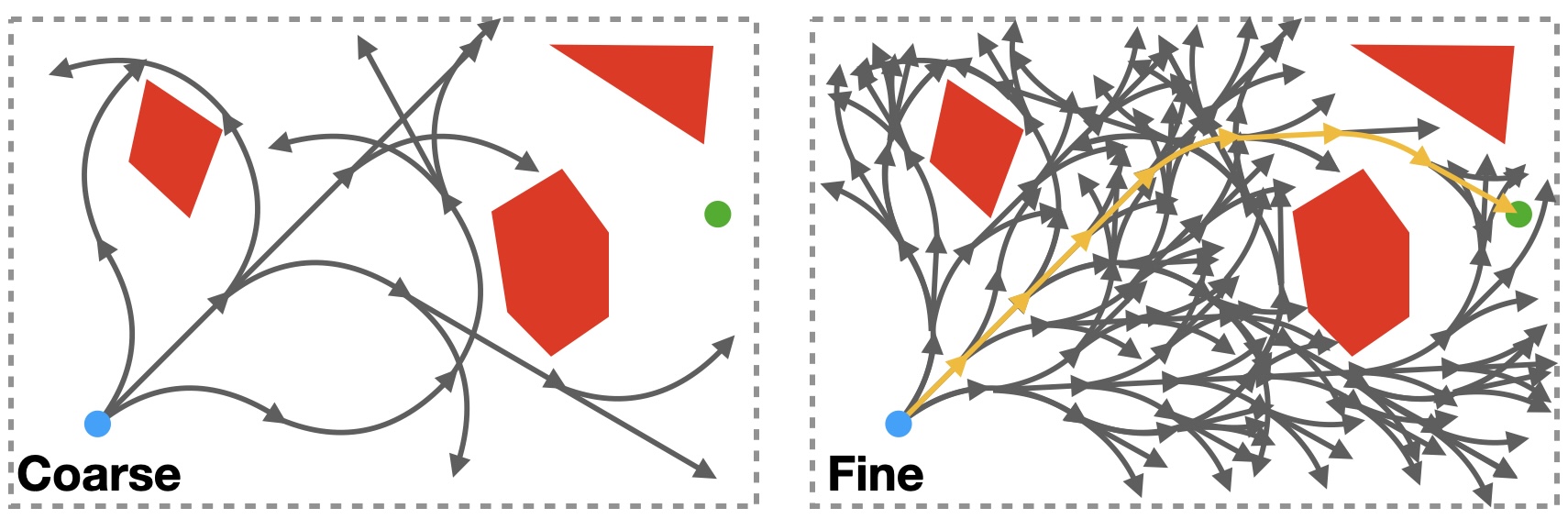
In this tutorial we share how to use our open source TDCR follow-the-leader motion planner (Python, Matplotlib viewer). Our code is capable of defining 3D cu...
In this post we present a tutorial on how to use our open source TDCR contact model (C++, MATLAB, Python interface). This model is capable of building custom...
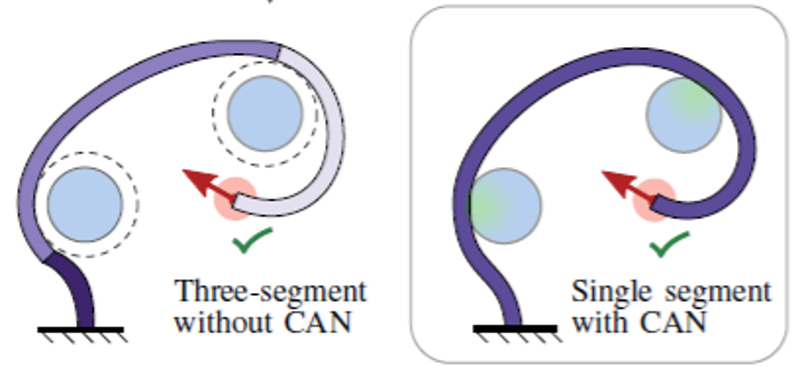
What if we moved away from the classical obstacle avoidance paradigm in robotics and allowed continuum robots to leverage contact with the environments?
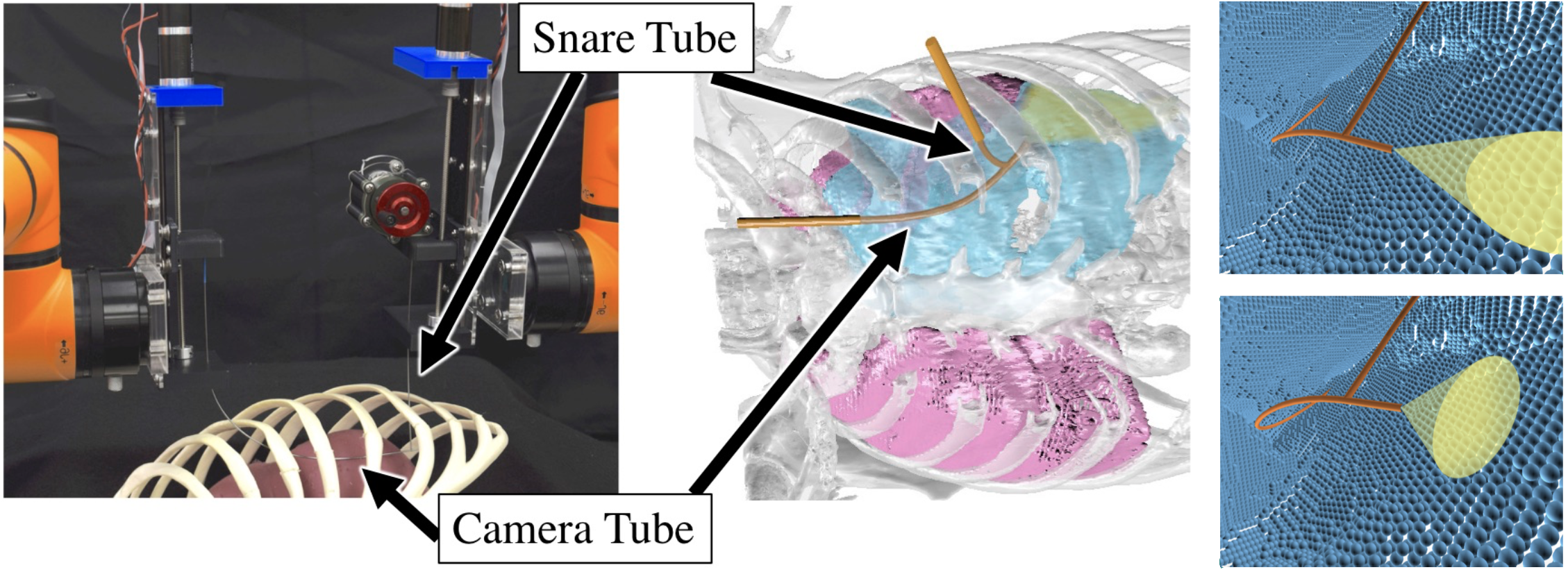
A Case Study of Inspection Using the CRISP Robot In certain medical applications, physicians may want to inspect some region of interest for diagnostic purpo...
A Case Study of Steerable Needles Steerable needles are a type of continuum robot, distinguished by their flexibility and capability to navigate through comp...
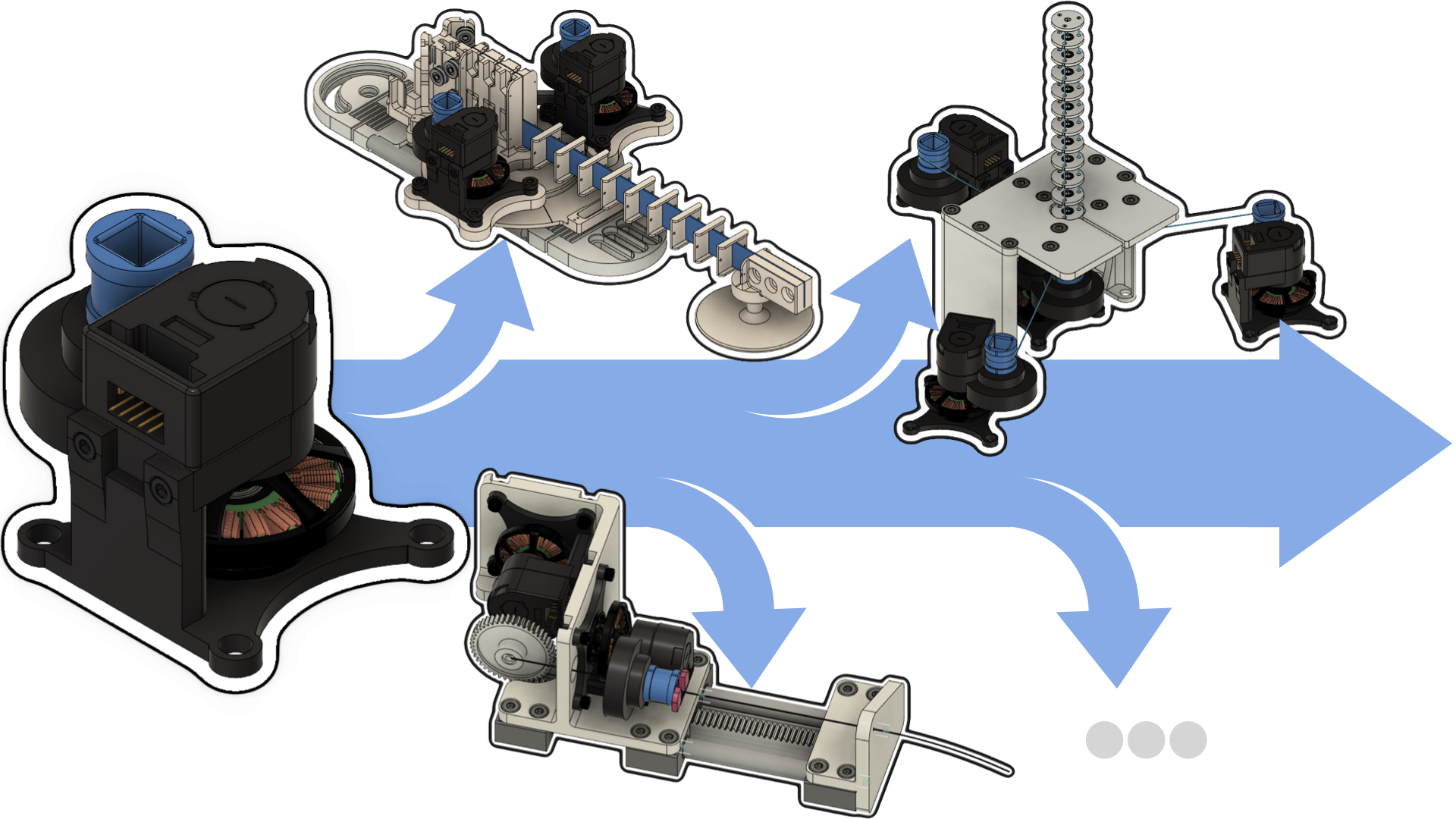
Hi! I am Ankit and I’ve spent my summer 2023 at the CRL developing a learning kit for Tendon Driven Continuum Robots together with Reinhard Grassmann. The le...
What makes motion planning particularly challenging for continuum robots? How does the continuum robotics community tackle those challenges?
A quick introduction to motion planning, how to represent the problem, and what methods exist to solve it.
A curated list of continuum robotics research presented
An open actuation module to create your continuum robots. One for all!
Opportunities for continuum robotics are largely unexploited, as the medical focus restricts and constrains innovation.
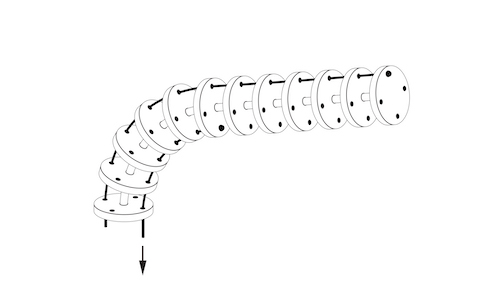
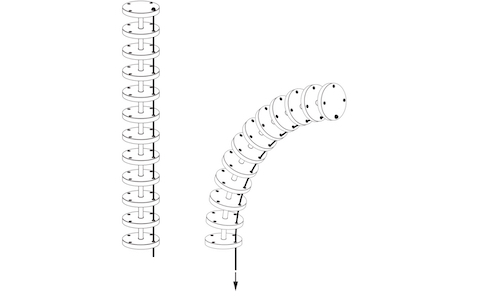
Let’s conceptually think about tendon routing disks. They provide channels to route the tendon actuating a continuum robot.
CRVisToolkit now provides utilities to create professional looking plots of concentric tube continuum robots using MATLAB.
The first concentric tube continuum robot was published in 2005! And yet, the community usually refers to two papers from 2006 as the first. Why?
A simple free-space model for CTCR.
Launching the CRVisToolkit providing you with utilities to create professional looking plots of tendon-driven continuum robots using MATLAB.
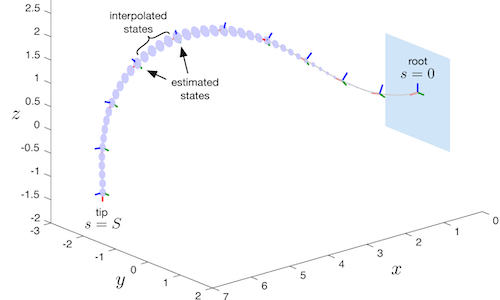
Today, we continue our introduction to sensing the state of a continuum robot. If you have missed Part I of the intro, look at last week’s blog post before y...
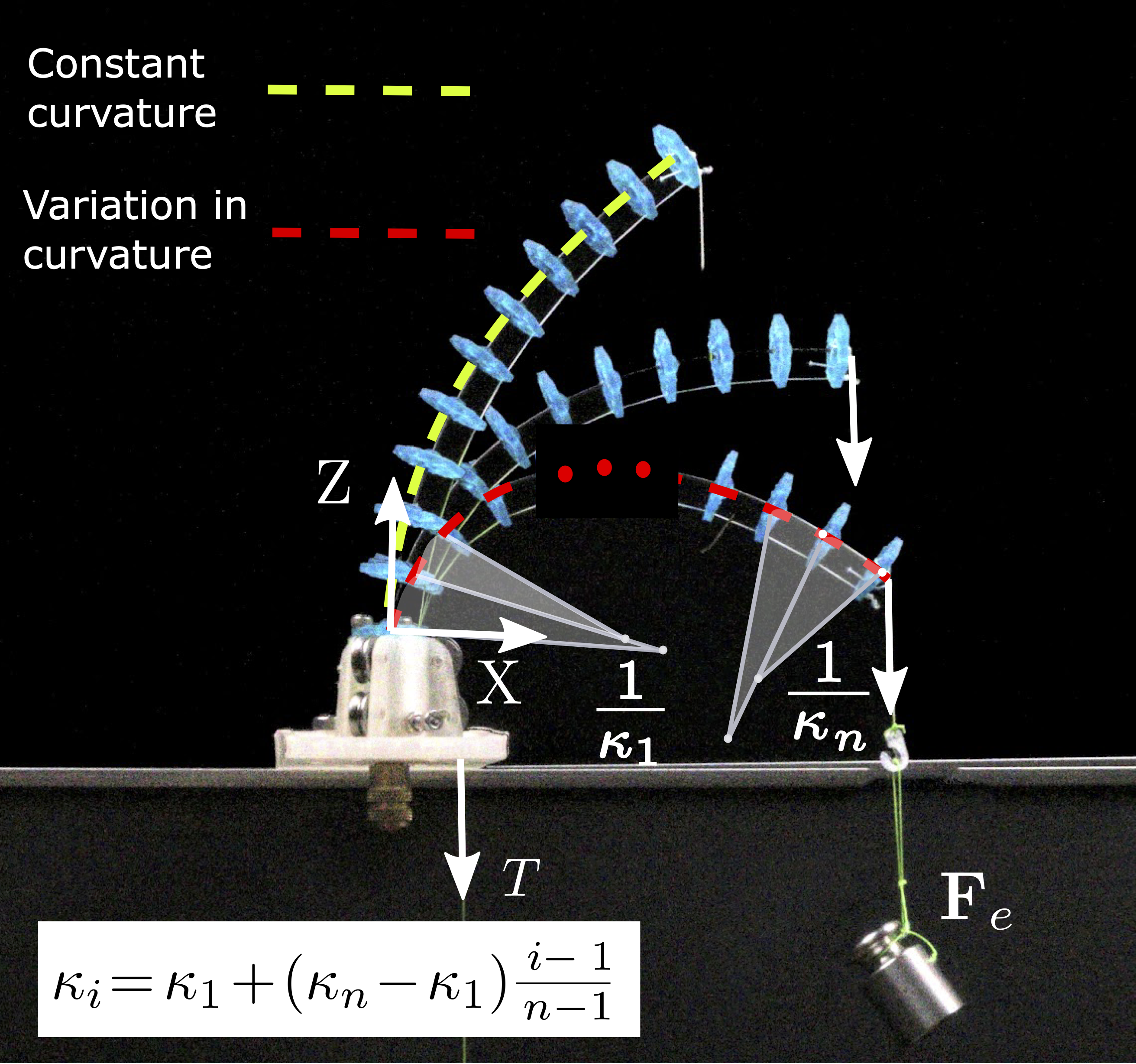
Students often ask "How much do I need to pull on a tendon?"
Continuum robots must perceive their own position, pose, or full shape, namely proprioception, and be able to feel external stimuli, namely exteroception.
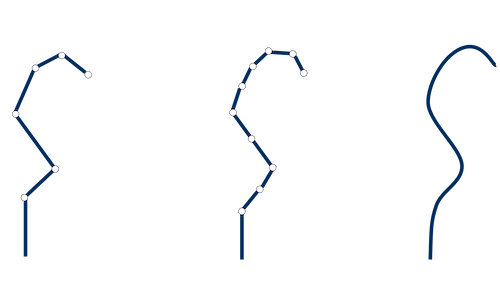
Euler curves are a more powerful representation than constant curvature arcs to represent the shape of a continuum robot.
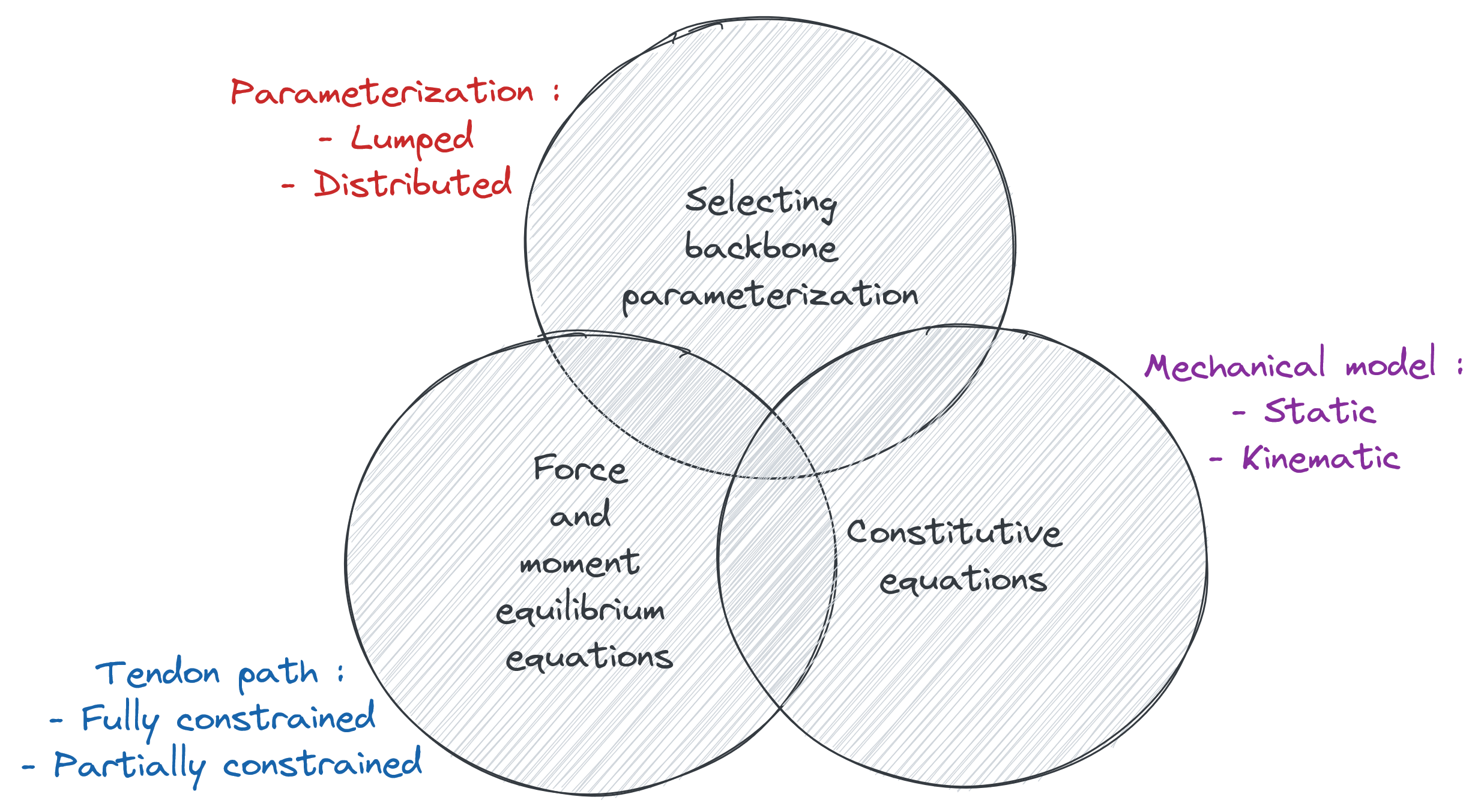
We outline three major steps to designing the right model for a tenon-driven continuum robot for your purposes.
A recap of the highlights of the year for the Open Continuum Robotics Project.
In today’s blogpost, we are turning to the problem of state estimation for continuum robots. While the modeling of continuum robots, which was covered by se...
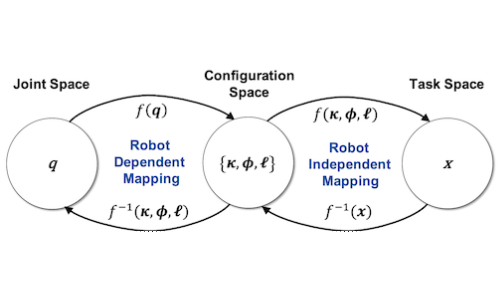
Modeling of tendon-driven continuum robots using the constant-curvature kinematics framework.
Continuum robots, oh so sleek…
This kinematics framework is widely used for continuum robots.
Many fiction writers have thought of continuously bendable robots.
The slender structure of continuously bending robots can be represented by a space curve.
In the 1990s, continuum robotics research is taken up by more research groups.
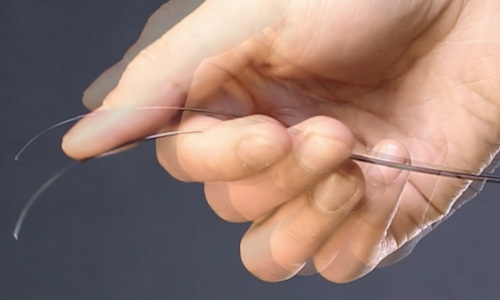
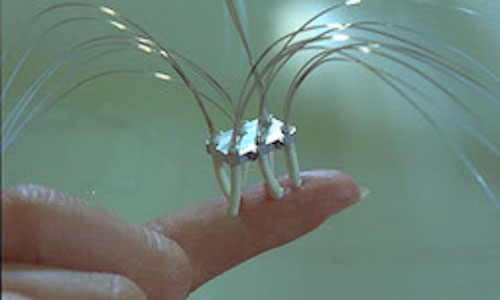
The smallest among all continuum robots.
The 1980s mark the decade which lead to major developments in continuum robot designs!
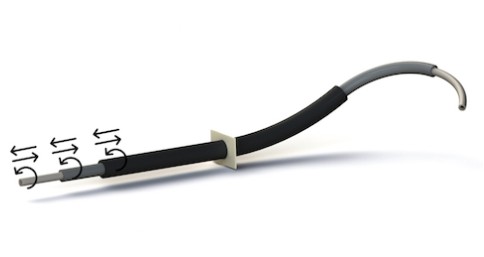
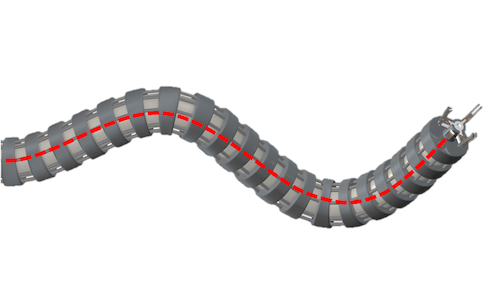
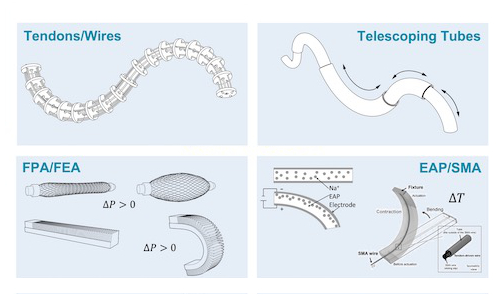
Tendon-driven continuum robots are the most common type.
An early continuum robot was driven by cables.
Continuum robots can be classified according to the method and location of their actuation.
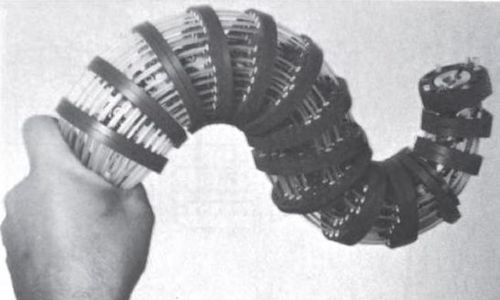
The very first continuum robot is named after the Norwegian term for snake.
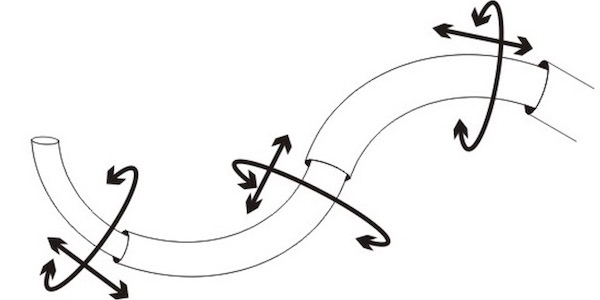
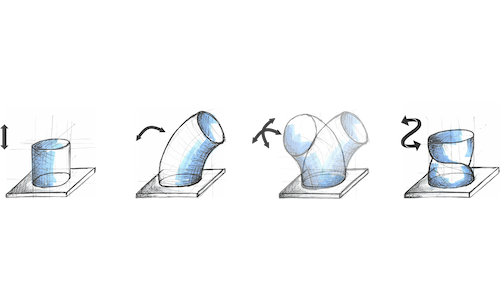
What are the motion capabilities of a continuum robot?
The first public dataset for a concentric tube continuum robot to democrotize research on their learning-based and physics-based modeling.
We are starting our 101 blog post series. In this category, we will present introductory concepts in continuum robotics targeted at novices who have prior kn...
A curated list of continuum robotics research presented @IROS22.
What is the open continuum robotics project?